NREC designed, built and deployed Pipeline Explorer, the first untethered, remotely-controlled robot for inspecting live underground natural gas distribution pipelines.
Explorer represents the state of the art in remote-controlled inspection systems for low-pressure and high-pressure natural gas pipelines. The battery-powered Explorer performs long-range, extended duration visual inspections of cast-iron and steel gas mains. Unlike older, tethered systems, Explorer inspects thousands of feet of pipeline from a single excavation point. An operator controls Explorer through a wireless link and can monitor pipeline images in real time.
With an aging gas pipeline infrastructure, utilities face ever-increasing needs for more frequent inspections of the distribution network. Conventional pipe-inspection methods require frequent access excavations for the use of push-pull tethered systems with an inspection range of no more than 100 to 200 feet per excavation. This results in multiple, costly and lengthy inspections for multi-mile sections of pipe in search of data needed for decisions on pipeline rehabilitation. The Explorer system can access thousands of feet of pipeline from a single excavation. It collects real-time visual inspection data and provides immediate remote feedback to the operator for decisions relating to water intrusion or other defects. This information is collected faster and at a lower cost than can be obtained via conventional methods.
Articulated Body Design
The robot’s architecture is symmetric. A seven-element articulated body design houses a mirror-image arrangement of locomotor/camera modules, battery carrying modules, and locomotor support modules, with a computing and electronics module in the middle. The robot’s computer and electronics are protected in purged and pressurized housings. Articulated joints connect each module to the next. The locomotor modules are connected to their neighbors with pitch-roll joints, while the others are connected via pitch-only joints. These specially designed joints allow orientation of the robot within the pipe, in any direction needed.
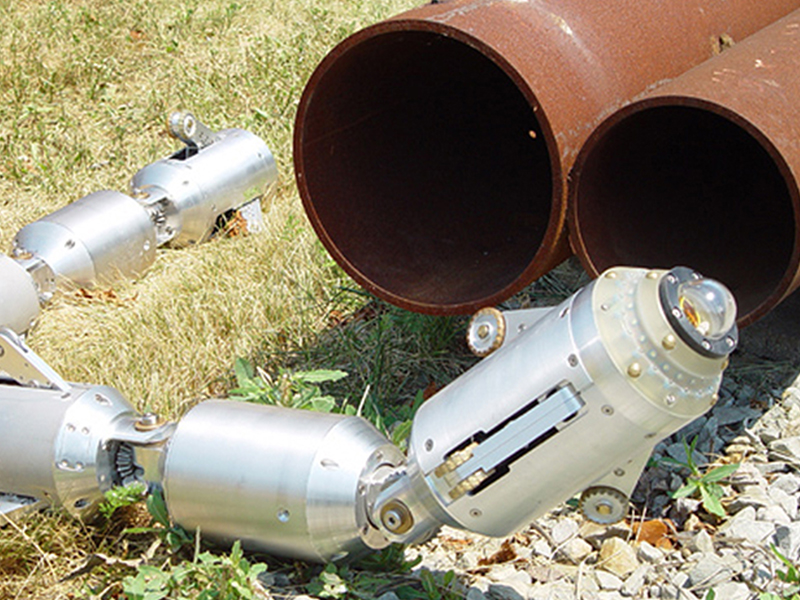
Locomotor Module
The locomotor module houses a mini fish-eye camera, along with its lens and lighting elements. The camera has a 190-degree field of view and provides high-resolution color images of the pipe’s interior. The locomotor module also houses dual drive actuators designed to allow for the deployment and retraction of three legs equipped with custom-molded driving wheels. The robot can sustain speeds of up to four inches per second. However, inspection speeds are typically lower than that in order for the operator to obtain an image that can be processed.