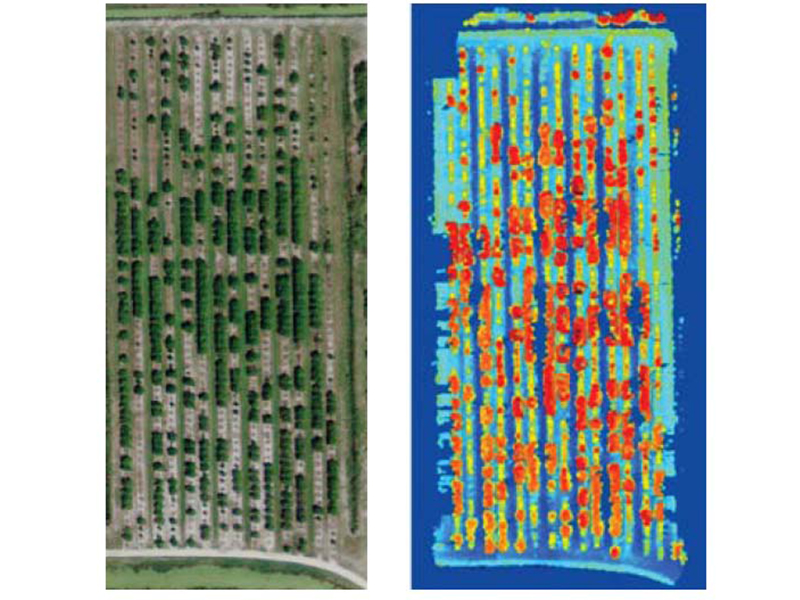
NREC developed a tree inventory system usingvehicle-mounted sensors to automatically count and map the locations of trees in an orchard. A probabilistic model combines ladar data of the trees with expected tree spacing to generate the tree inventory. The results are within 1% agreement with manually-collected tree counts.
An accurate, up-to-date inventory of tree locations and sizes is important for yield prediction and farm management. This is especially true when trees are removed due to disease or other problems. Currently, trees are manually inventoried by driving up and down the rows of an orchard with a hand counter. However, this is a tedious process and does not give the locations of individual trees.
Fruit growers wanted to automatically generate a tree inventory that would be compatible with their manual process, give GPS coordinates for each tree, and integrate within their existing Geographic Information System (GIS) orchard management process.
Ladar and GPS System
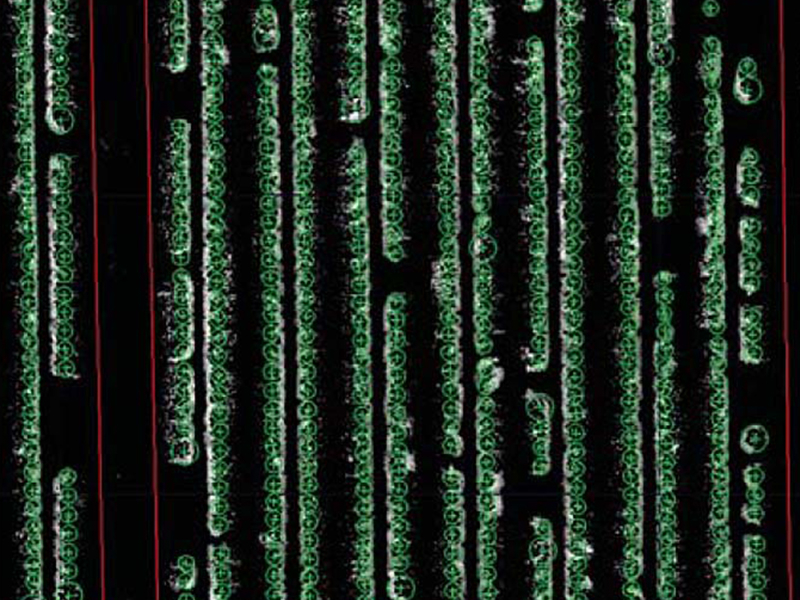
The automated tree inventory system uses vehicle-mounted ladar and GPS. A vertically mounted 270° ladar synchronized with the GPS receiver scans the trees and makes an accurate, three-dimensional measurement of the tree canopy. The ladar data collected by a tractor during spray control and autonomous operation is normally used for tree inventory. Alternatively, a standaloneladar and GPS system can be mounted on any vehicle (e.g. pickup truck).
Tree Modeling Algorithm
To handle both separated trees and continuous walls of trees, the automatic tree inventory system combines features extracted from the 3D ladar data with a prior distribution of expected tree spacing. The system uses the GPS location of the ladar data to look up the expected tree spacing in an existing GIS spatial map of the orchard. This map also breaks the tree data down into individual rows. This allows the tree modeling algorithm to find the best tree count that matches both the ladar data and the expected tree spacing.