NREC teamed with Oshkosh Defense to develop autonomous unmanned ground vehicle (UGV) technologies for tactical logistics wheeled vehicles used by the US Marine Corps. The Cargo UGV project’s goal was to mix manned and unmanned logistics vehicles in supply convoys to reduce the drivers’ exposure to danger and free them to perform other duties.
Convoys perform essential logistic and resupply missions. Convoy trucks must do more than just follow each other at a safe driving distance, including meeting the following parameters:
Cargo Unmanned Ground Vehicles (Cargo UGVs or CUGVs) are designed for autonomous use in convoys that combine manned and unmanned vehicles. An operator in another vehicle supervises one or more unmanned vehicles, which drive autonomously in convoy formation day and night, in all weather, and when dust and smoke limit visibility.
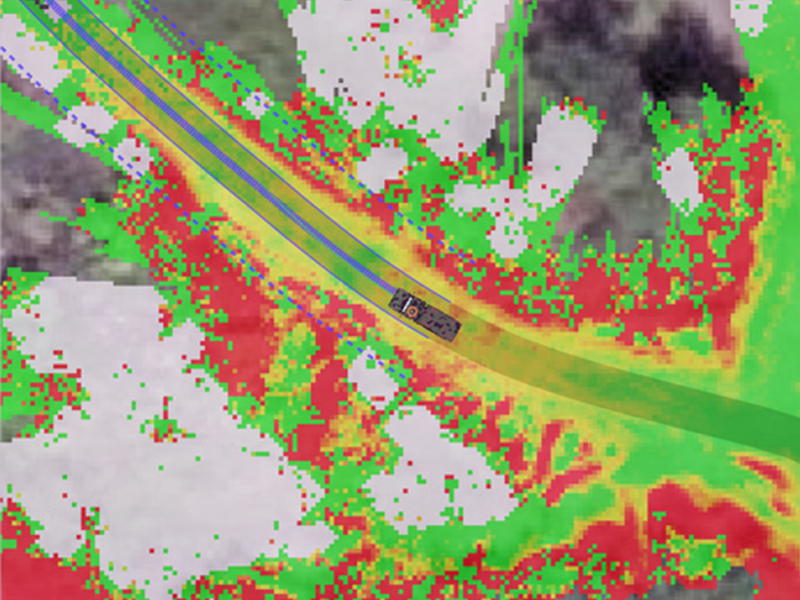
Cargo UGV’s advanced perception system is specifically designed to support autonomous vehicles driving in convoys on unimproved roads. The perception system uses multiple sensors (ladars, cameras, radars) to perform multiple assessments of its environment. The perception system must:
The planning software system guides and controls Cargo UGVs through the environment and performs several tasks before, during and after the mission. The planning system performs the following:
This project was funded by the Marine Corps Warfighting Laboratory (MCWL) via the National Advanced Mobility Consortium (NAMC) and Oshkosh Defense.