NREC developed Enhanced Teleoperation: a real-time 3D video system to improve situation awareness in teleoperation and indirect driving of unmanned ground vehicles in complex environment.
Teleoperating a vehicle without line-of-sight is a very difficult and tedious task. Many factors contribute to the degradation of performance: narrow field of view of cameras, lack of 3D perception, jitter in images due to vibration, etc. Furthermore, many operators suffer from various levels of motion sickness when operating from another vehicle.
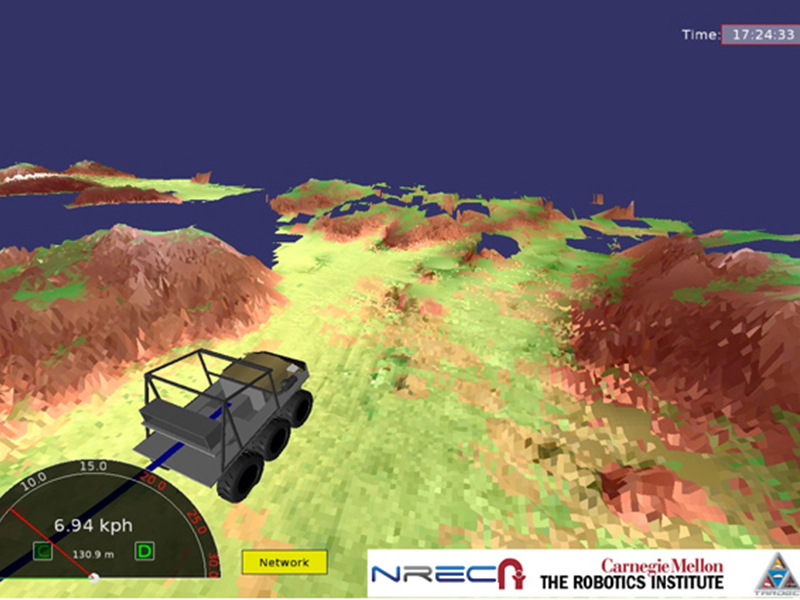
To improve teleoperation, our team developed the Soldier Awareness through Colorized Ranging (SACR) to provide a 3D environment with photo-realistic computer graphic models of the surroundings, all in real-time. These improvements give drivers a better view of a vehicle’s surroundings, improving their awareness of its environment and making remote and indirect driving safer, easier, and faster. Other potential SACR applications include mapping, mission visualization, mission rehearsal, and localization of personnel and vehicles. In field trials, operators performed 20% to 50% better on a range of driving tasks with SACR than they did with existing 2D video systems.
SACR uses 3D video to improve a driver’s awareness of the environment. The SACR sensor pod includes a high-definition video camera and laser range finder. One or more sensor pods can be mounted on a vehicle. SACR fuses video and range input from the sensor pods in real time to build a 3D computer graphics model of the vehicle’s surroundings.
Features:
This program was funded by the U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC).